Control in Bioengineering:
Applications to the Nervous System

FUNCTIONAL ELECTRICAL STIMULATION

OVERVIEW
Functional Electrical Stimulation (FES) a technique that uses small external electrical currents to stimulate injured nerves and induce skeletal muscle contraction. FES can be used to stimulate nerves in the arms, legs, and the trunk of the body in order to achieve a range of functional movements. FES devices electrically activate nerve cells, which then may go on to activate muscles or other nerves. By precisely controlling electrical stimulation, we can change the body posture and accomplish many actions, which include balancing, standing and walking. FES has been successfully adopted for stroke rehabilitation, spinal cord injuries and many limb motor dysfunctions in clinic applications. [1]
FES IN FOOT DROP TREATMENT

Figure 1: A diagrammatic representation of Foot Drop, a gait abnormality experienced due to weakness, irritation or damage to the common fibular nerve including the sciatic nerve, or paralysis of the muscles in the anterior portion of the lower leg. [1]
The use of Functional Electrical Stimulation (FES) in the lower extremities of the body has been well acknowledged for improving the lifestyle of individuals suffering from spinal cord injuries. The first attempt for using FES in drop foot treatment was in 1961. [1]
Liberson et al developed the first neuroprosthesis based on FES theory for drop foot treatment. [1] The neuroprosthesis worked by stimulating the common peroneal nerve using skin-surface electrodes. Later, the basis of FES standing and stepping correction was firmly established for neurologically impaired patients, but due to the limitations of technology at the time, a portable neuroprosthesis could not be made until the early 1980s, when multi-channel devices under microprocessor control were made. [1]
CONTROL DESIGN OF FES WALKING SYSTEMS
Open-Loop Systems
Open-loop FES systems are the simplest of walking-assistive devices. By pressing buttons on a rolling frame, elbow frame-walker or crutches, the user can trigger stimulation sequences for standing up, stepping forward or sitting down, as well as increasing/decreasing the stimulation intensity. [2]
The system is open-loop because the stimulator’s controller receives no direct feedback about the actual state of the system (i.e. the position of the lower limbs). In general, neuromuscular stimulation is triggered and adjusted by means of buttons that are mounted on crutches or a walking frame. [2] For the user, this presents the requirement of pressing buttons on a frequent basis, which could be inopportune considering that the hands need a firm grip on the frame handles and that an error in pressing commands could result in a fall.
These limitations have led some researchers to consider closed-loop controller systems whereby feedback is processed in real time and used to modify stimulation sequences so that a desired outcome may be achieved.
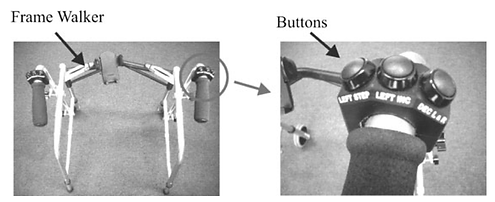
Figure 2: Walking frame with buttons to evoke functional electrical stimulation mobility tasks. [2]
Closed-Loop Systems
Closed-loop control in FES walking systems has been used to generate controlled and target-directed movements. [2] The current review considers two fundamental classes of feedback information comprising signals generated by biological processes and signals derived from artificial sensors.
1. Biological Feedback:
Recordings of two different biopotentials are the primary source for FES control of walking: muscle activity through EMG signals (electromyogram) and brain activity through EEG signals (electroencephalogram).
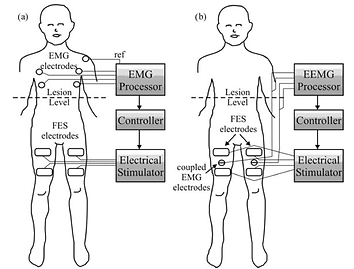
EMG signals are used to trigger stimulation sequences and monitor quadriceps fatigue on the stance leg. [2] Initiation of stepping is sometimes derived from the EMG analysis of the contraction patterns of muscles above the lesion level (Fig. 3a). Alternatively, the use of EMG signals recorded from the quadriceps can be used to assess fatigue during FES standing (Fig. 3b).
The use of EMG signals is an inexpensive and readily available technology. Nevertheless, its application in the “real-world” setting seems quite limited, because its deployment requires multiple pairs of EMG electrodes. Also, the user may have difficulties in reproducing the position of the EMG electrodes, resulting in a possible system malfunction.
Figure 3 (a) above-lesion and (b) below-lesion electromyogram (EMG) feedback.
In an attempt to overcome the limitations of EMG, some researchers have investigated the use of signals recorded from the brain (EEG signals) as a trigger for predefined FES walking tasks. [2] From EEG signals, movement-related potentials (MRPs) have been extracted and used as inputs to FES control. This type of feedback is considered to be more complicated to control. Moreover, this more invasive approach might only be possible after the development of more clinically acceptable technologies.
2. Artificial Feedback:
Accurate temporospatial information (information on time and space) about the lower limbs is critically important for the performance of any closed-loop FES system. In the past, different technologies have been used to measure lower body kinematics and kinetics or to detect phases of the gait cycle. These include electrogoniometers, potentiometers, hall effect transducers, optical fibers, polymer piezoresistive materials, piezoelectric transducers and IC capacitive sensors. [2] Despite their ability to perform measurements more or less precisely, most of these devices have been found to be time-consuming to set up and have generated data of limited reliability.
A different type of artificial sensor, considered as a substitute for EMG feedback in relation to foot-floor contact, is the use of force sensing resistors (FSRs). Deployed into shoes, FSRs detect stance, toe-off and heel-strike, and can be used to automatically trigger the stimulation sequences for stepping. [2]
References
1. Bijak M, Rakos M, Hofer C et al. Stimulation parameter optimization for FES supported standing up and walking in SCI patients. Artif Organs 2005;29:220–223.
2. Gustavo P. Braz, PhD· Michael Russold, PhD · Glen M. Davis (2009) 'Functional Electrical Stimulation Control of Standing and Stepping After Spinal Cord Injury: A Review of Technical Characteristicsner_213 180..190', NEUROMODULATION: TECHNOLOGY AT THE NEURAL INTERFACE, 12(3), pp. 180-190.